Project Overview
This project represented my first end-to-end responsibility for the design, sourcing, and project management of a complex mechatronic system. I developed a high-rigidity 3-axis stabilization gimbal designed to carry cinematic DSLR payloads on heavy-lift drone platforms.
Beyond mechanical architecture, my involvement extended into the electrical integration layer, contributing to open-source hardware configurations to optimize motor control and positional feedback for high-vibration environments.
Technical Contributions
- Mechanical Architecture: Engineered a lightweight yet high-rigidity frame optimized for drone mounting, featuring quick-detach handles for handheld versatility.
- Precision Sensing: Integrated Hall Effect sensors to provide high-resolution absolute position encoding for each axis, mitigating drift during high-velocity aerial maneuvers.
- Mechatronic Integration: Customized brushless motor driver chips and driver logic to interface with the SToRM32 open-source platform.
- Stress Analysis: ensured motor mounts and structural joints could withstand the continuous torque loads of cinematic payloads.
Visual Documentation
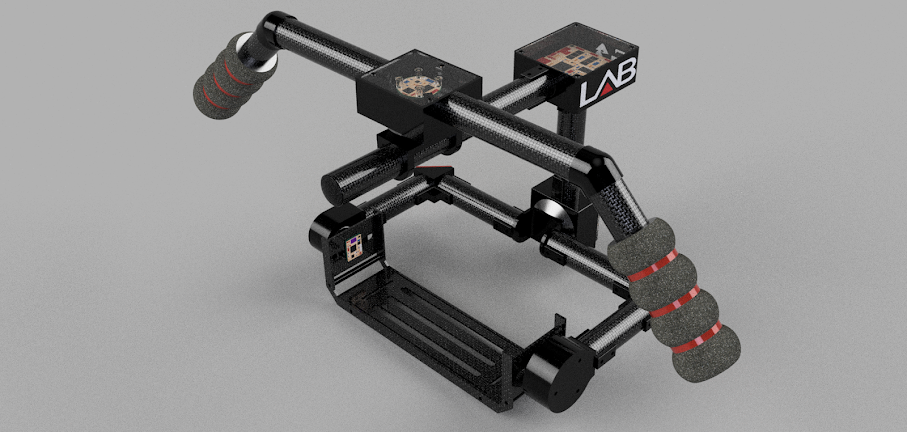
System Design: Full CAD assembly in Fusion 360. The design allows for the direct mounting of the third axis to a drone chassis via the top vibration isolation plate.
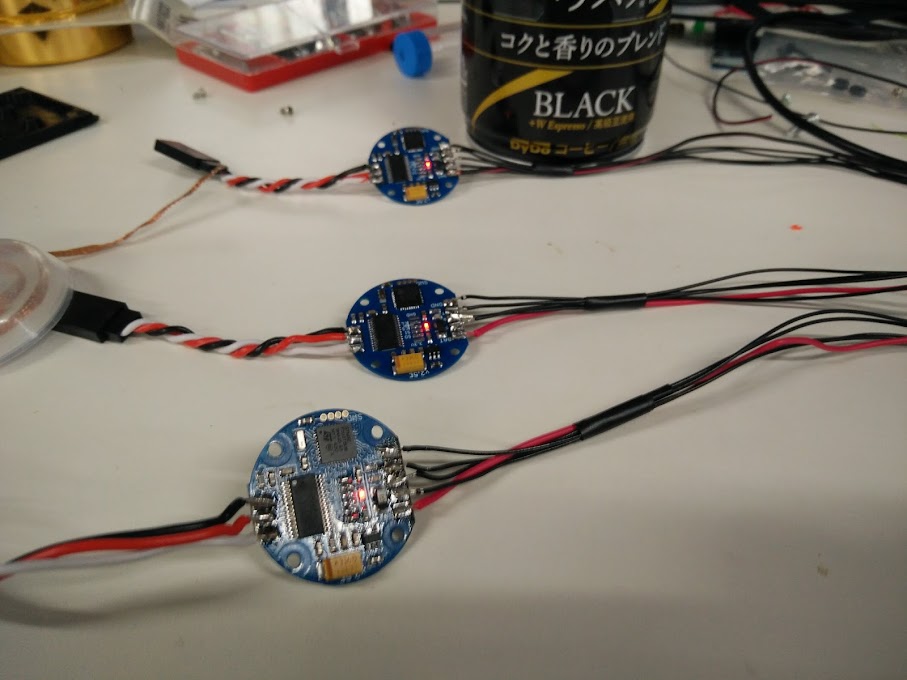
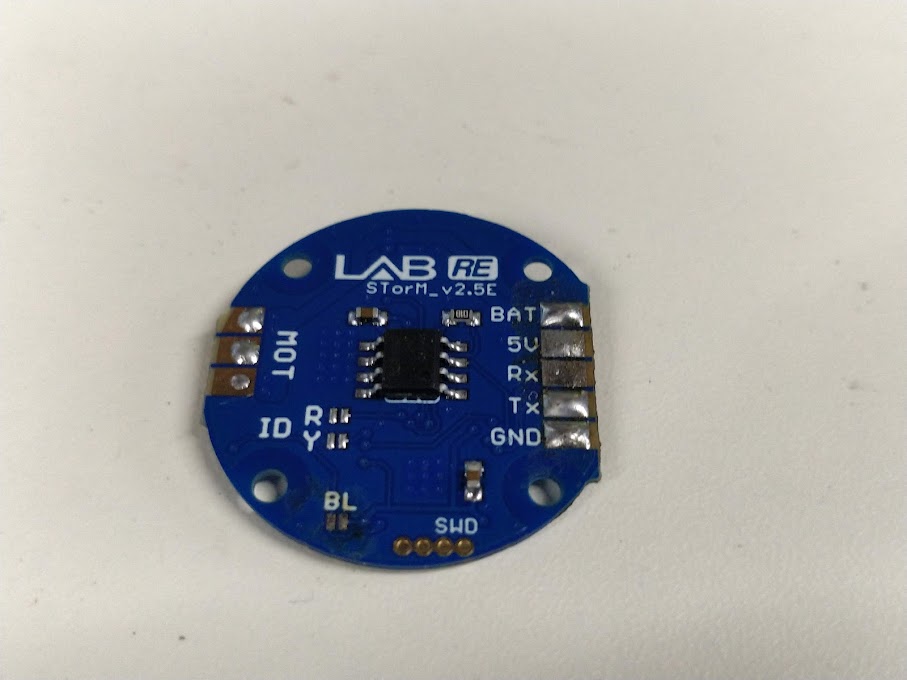

Mechatronic Prototyping: Development of custom encoder rings and Hall Effect sensors for real-time positional feedback on brushless motors.
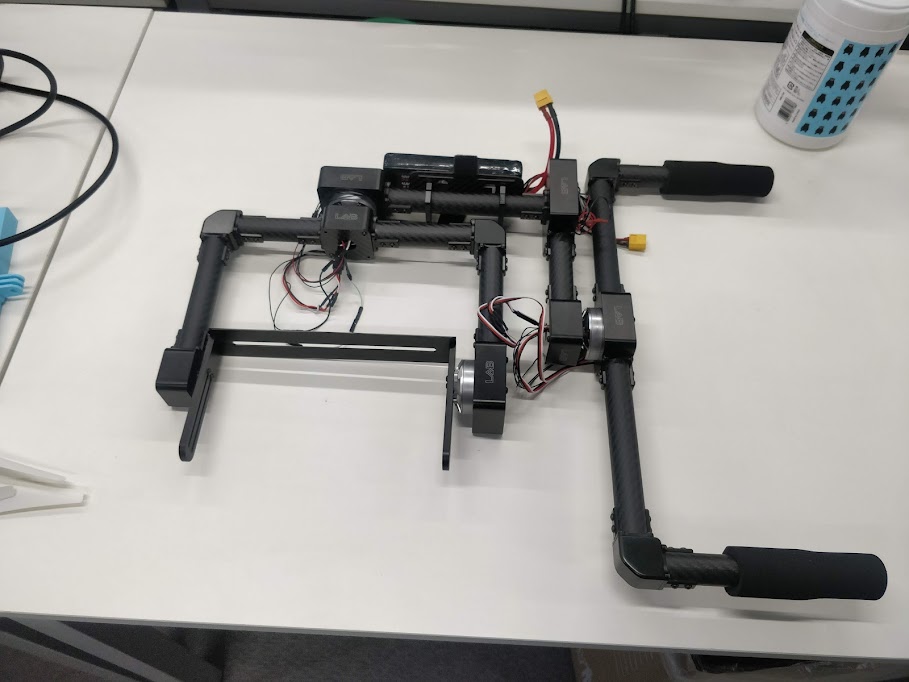
Validation: Final assembly and functional testing of motor response and stabilization logic under manual control.