Project Overview
This automated system engineered a seamless bridge between a high-volume roll-forming machine and a precision robotic palletizing cell. The integrated line captured structural solar rails directly from the rolling former, orienting and staging them for rapid container loading.
I was responsible for the full-cycle mechanical development of the handling mechanisms, ensuring that the staged rails remained within tight tolerances for high-speed robotic picking and placement.
Technical Contributions
- End-of-Arm Tooling (EOAT): Designed a custom robotic gripper optimized for the unique profile of solar support rails.
- Staging Mechanisms: Engineered pneumatic part-stop systems to ensure consistent rail orientation prior to palletization.
- Conveyance Integration: Managed the sourcing and troubleshooting of specialized infeed and dunnage conveyance systems from MK Conveyor.
- System Validation: Executed kinematic simulations in Roboguide to optimize cycle times and prevent mechanical interference.
Visual Documentation
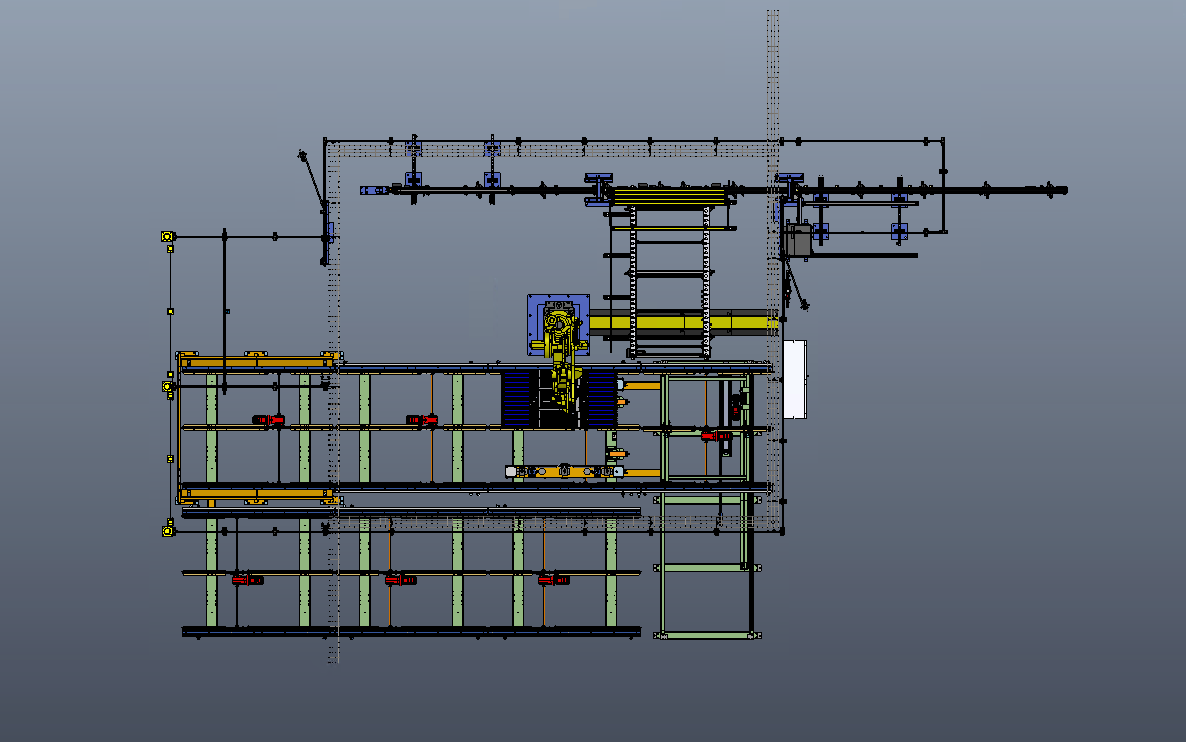
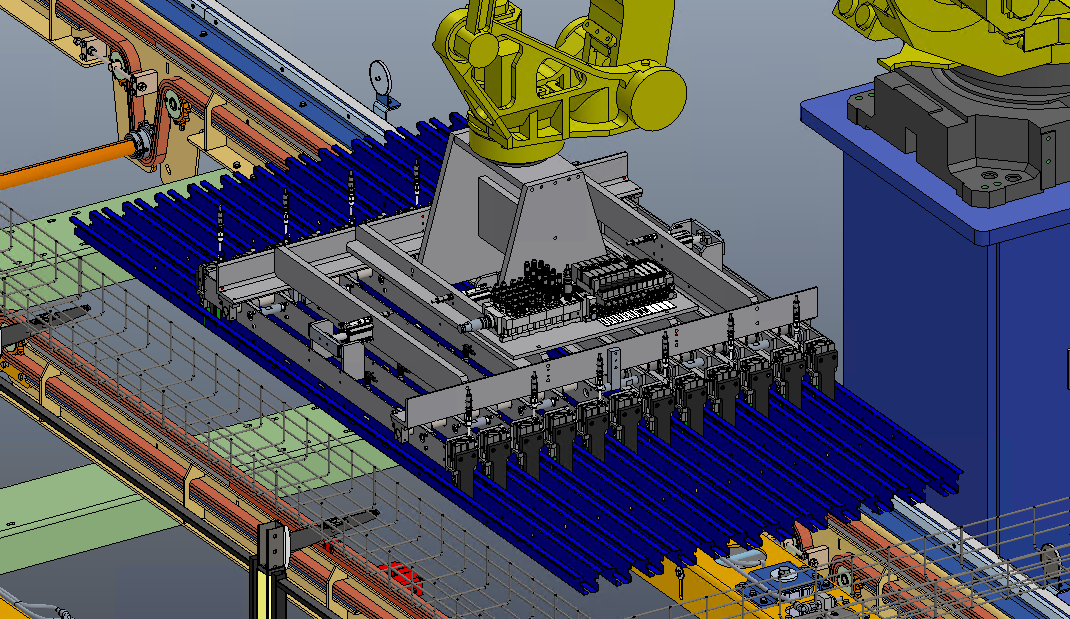
System Design: SolidWorks assembly of the palletizing cell and the integrated roll-former infeed line.
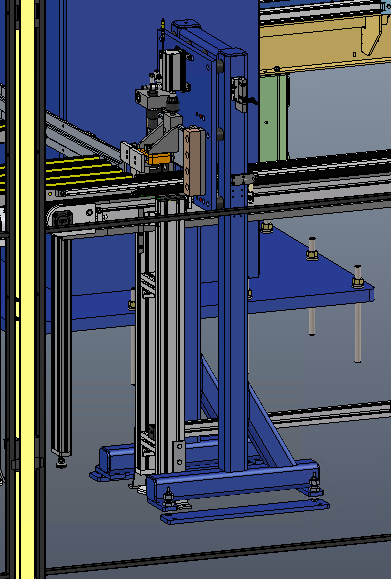
Staging Logic: Pneumatic part-stop assembly from digital design to production validation.

Robotic Tooling: Custom-engineered end-of-arm tool (EOAT) for secure rail manipulation.

Deployment: Successful functional test of the robotic gripper during the commissioning phase.